
Autonomes Fahren: Was muss ein Auto dafür können und wann können wir das nutzen?
Ein Tempomat hilft, die Geschwindigkeit zu halten, ein Spurhalteassistent schützt vor einem unbeabsichtigten Fahrbahnwechsel und der Totwinkelwarner weist auf Autos oder Personen im toten Winkel hin.
Neue Autos bieten viele solcher einzelnen Assistenzsysteme und sorgen damit für mehr Sicherheit beim Fahren. Trotzdem ist der:die Fahrer:in immer noch selbst dafür verantwortlich, das Auto zu lenken und die Geschwindigkeit zu bestimmen.
Doch das soll sich in Zukunft ändern. Autonomes Fahren soll unter anderem mehr Sicherheit und Effizienz bringen und den Fahrer:innen die Möglichkeit geben, ihre Zeit besser zu nutzen.

Doch wie lange müssen wir darauf noch warten und wie ist der aktuelle Stand?
Generell ist der Weg hin zum autonomen Fahren in 5 Stufen eingeteilt:
- Assistiertes Fahren
- Teilautomatisiertes Fahren
- Hochautomatisiertes Fahren
- Vollautomatisiertes Fahren
- Autonomes Fahren
Aktuell werden bereits Fahrzeuge mit Stufe 3-5 auf Teststrecken gefahren, in festgelegten Bereichen dürfen aber maximal Fahrzeuge der Stufe 4 am normalen Verkehrsleben teilnehmen.
Bis ein komplett autonomes Fahren möglich sein wird, wird also noch einiges an Zeit vergehen. Schon seit dem letzten Jahrzehnt arbeiten Autohersteller, Startups und technische Unternehmen an der Entwicklung neuer Technologien, die das autonome Fahren möglich machen können. Trotz der langen Entwicklungszeit, können Expert:innen jedoch immer noch nur schwer voraussagen, wann es möglich sein wird, komplett autonomes Fahren zu nutzen.
Technisch gesehen birgt die Umsetzung des autonomen Fahrens nämlich viele Herausforderungen.
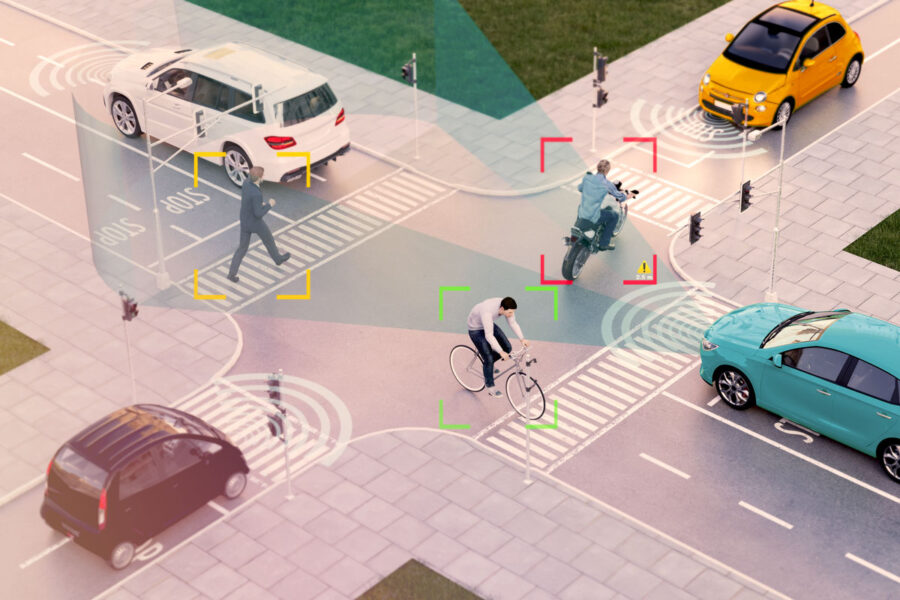
Das Auto muss in der Lage sein, seine Umgebung vollumfänglich wahrzunehmen und je einzelne Situation richtig einzuschätzen. Dazu gehört das Wahrnehmen von Objekten und die Einschätzung der Entfernung dieser. Damit das gelingt, sind in den Autos zahlreiche Sensoren (Radar- und Lidarsensoren) und Kameras verbaut und das Auto arbeitet mit einem GPS System.
Ein Computer wertet die gewonnenen Daten aus und ermittelt eine angemessene Reaktion. Dieser ist außerdem mit den Steuerelementen des Autos, also dem Lenkrad, dem Gas- und Bremspedal und schließlich mit dem Motor verbunden. Ziel ist ein perfektes Zusammenspiel, das eine sichere Navigation ermöglicht.
Kommunikation im Verkehrsgeschehen
Wichtig ist auch der Austausch unter den Autos. So müssen Autos an einer Kreuzung Signale austauschen und dann eine Regelung für die Vorfahrt finden. Auch Verkehrszeichen und Ampeln sollen später Teil des Kommunikationsprozesses sein und sich mit den Autos „austauschen“.
Funktionieren soll das unter anderem über die Mobilfunknetze, die deswegen noch stärker ausgebaut werden müssen.
Damit der ganze Prozess dann auch funktioniert, müssen die Autos lernen in allen möglichen Verkehrssituationen richtig zu reagieren. Wichtig ist deswegen, dass sie immer wieder auf Testfahrten geschickt werden.
Fußgänger:innen, die über die Straße laufen, Fahrradfahrer:innen, die neben den Autos auf den Straßen unterwegs sind, Verkehrssituationen wie Kreisverkehre, Fahrradstreifen, langsame Fahrzeuge wie Traktoren oder LKWs – all das muss das Auto später richtig einschätzen können, um Passagiere sicher von A nach B zu bringen und die anderen Verkehrsteilnehmer zu schützen.
Gefahren werden diese Fahrzeuge bei Testfahrten dann nicht von normalen Fahrer:innen, sondern von speziellen Erprobungsingenieuren.
Durch das ständige Testen ist dann Stück für Stück ein flüssigeres Fahren möglich, da viele Situationen bereits bekannt sind. Mehr Sicherheit bringt dann die Chance immer wieder weitere Funktionen freizuschalten und zu testen.






